
搬运机械手plc控制系统设计,搬运机械手PLC控制系统设计概述
时间:2024-09-30 来源:网络 人气:
搬运机械手PLC控制系统设计概述
随着工业自动化技术的飞速发展,搬运机械手在制造业中的应用越来越广泛。PLC(可编程逻辑控制器)因其可靠性高、编程灵活、易于维护等优点,成为搬运机械手控制系统的首选。本文将详细介绍搬运机械手PLC控制系统的设计过程。
一、搬运机械手PLC控制系统设计原则
1. 系统可靠性:确保控制系统在各种环境下稳定运行,提高生产效率。
2. 系统可扩展性:便于未来系统升级和功能扩展。
3. 系统安全性:确保操作人员及设备安全。
4. 系统经济性:在满足功能需求的前提下,降低系统成本。
二、搬运机械手PLC控制系统硬件设计
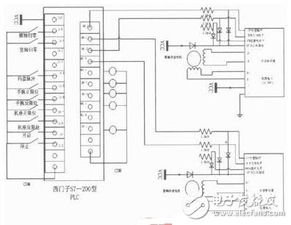
1. PLC选型:根据搬运机械手的控制需求,选择合适的PLC型号。如西门子S7-200、三菱FX3U等。
2. 输入输出模块:根据机械手控制需求,配置相应的输入输出模块。如数字输入模块、模拟输入模块、数字输出模块、模拟输出模块等。
3. 执行机构:包括电机、气缸、传感器等。根据机械手动作需求,选择合适的执行机构。
4. 通信模块:实现PLC与其他设备之间的数据交换,如触摸屏、上位机等。
三、搬运机械手PLC控制系统软件设计
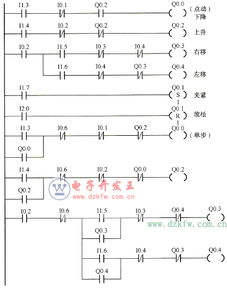
1. 编程语言:根据PLC型号,选择合适的编程语言。如梯形图、指令列表、结构化文本等。
2. 控制程序设计:根据机械手动作需求,编写控制程序。主要包括以下部分:
(1)初始化程序:初始化PLC内部变量、输入输出端口等。
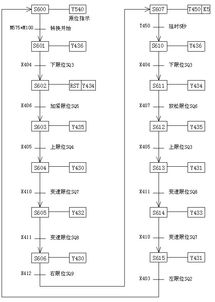
(2)主程序:实现机械手动作控制,包括上升、下降、夹紧、放松、快进、慢进、快退、慢退等动作。
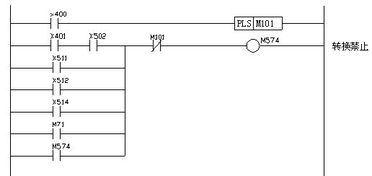
(3)辅助程序:实现机械手动作过程中的各种辅助功能,如限位保护、故障诊断等。
3. 人机界面设计:设计触摸屏或上位机界面,实现人机交互功能。如设置参数、监控机械手状态、故障报警等。
四、搬运机械手PLC控制系统调试与优化

1. 调试:根据控制程序,对机械手进行调试,确保其动作准确、可靠。
2. 优化:根据实际运行情况,对控制系统进行优化,提高系统性能。如调整参数、优化控制算法等。
五、结论
搬运机械手PLC控制系统设计是工业自动化领域的重要课题。通过合理设计硬件和软件,可以实现对搬运机械手的精确控制,提高生产效率,降低生产成本。本文对搬运机械手PLC控制系统设计进行了详细阐述,为相关领域的研究和实践提供了参考。
相关推荐


教程资讯
教程资讯排行









