
hcsr04超声波测距模块,原理、应用与操作指南
时间:2024-10-02 来源:网络 人气:
HCSR04超声波测距模块:原理、应用与操作指南

一、HCSR04超声波测距模块简介

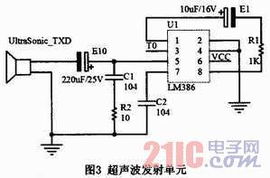
HCSR04超声波测距模块是一种基于超声波原理的测距传感器,它由超声波发射器、接收器、控制电路和电源组成。该模块能够发出超声波信号,当超声波遇到障碍物时,会反射回来,通过测量超声波发射和接收之间的时间差,即可计算出障碍物与传感器之间的距离。
二、HCSR04超声波测距模块原理

HCSR04超声波测距模块的工作原理如下:
给Trig触发控制信号IO端口至少10us的高电平信号。
模块自动发送8个40kHz的方波,并自动检测是否有信号返回。
有信号返回时,Echo回响信号输出端口输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
两次测距时间间隔最少在60ms以上,以防止发射信号对回响信号的影响。
根据超声波在空气中的传播速度(约340m/s),通过计算超声波从发射到返回的时间,即可得到障碍物与传感器之间的距离。公式如下:
距离 = (超声波往返时间 × 声速) / 2
三、HCSR04超声波测距模块应用
HCSR04超声波测距模块具有广泛的应用领域,以下列举一些常见应用:
家用:自动门、自动感应水龙头、自动扫地机器人等。
工业:机器人导航、自动化生产线、非接触式检测等。
医疗:超声波成像、医疗器械检测等。
科研:无人机、无人船等无人驾驶设备的导航系统。
四、HCSR04超声波测距模块操作指南
以下是HCSR04超声波测距模块的基本操作步骤:
连接电源:将模块的VCC端连接到5V电源,GND端连接到地。
连接控制信号:将模块的Trig端连接到单片机的控制信号IO端口,Echo端连接到单片机的另一个IO端口。
编写程序:根据实际需求编写程序,实现超声波测距功能。
调试与测试:将程序烧录到单片机中,进行调试和测试,确保测距精度和稳定性。
以下是一个简单的HCSR04超声波测距模块程序示例(以Arduino为例):
void setup() {
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT);
Serial.begin(9600);
void loop() {
long duration, distance;
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
duration = pulseIn(EchoPin, HIGH);
distance = duration 0.034 / 2;
Serial.print(
相关推荐


教程资讯
教程资讯排行









