matlab 线性系统理论,线性系统建模
时间:2024-10-21 来源:网络 人气:
线性系统理论是自动控制、信号处理、通信系统等领域的基础理论之一。MATLAB作为一种功能强大的科学计算软件,在线性系统理论的学习和研究中发挥着重要作用。本文将介绍MATLAB在线性系统理论中的应用,包括系统建模、稳定性分析、能控性和能观性判断等。
线性系统建模
传递函数模型:使用`tf`函数创建传递函数模型,例如:`sys = tf([1 2], [1 3 2])`,其中分子系数为 `[1 2]`,分母系数为 `[1 3 2]`。
状态空间模型:使用`ss`函数创建状态空间模型,例如:`sys = ss([1 2; 3 4], [5 6], [7 8], [9 10])`,其中状态矩阵为 `[1 2; 3 4]`,输入矩阵为 `[5 6]`,输出矩阵为 `[7 8]`,直接传递矩阵为 `[9 10]`。
零极点模型:使用`zpk`函数创建零极点模型,例如:`sys = zpk([1 2], [3 4], [5 6])`,其中零点为 `[1 2]`,极点为 `[3 4]`,增益为 `[5 6]`。
稳定性分析
根轨迹分析:使用`rlocus`函数绘制根轨迹,例如:`rlocus(sys)`。
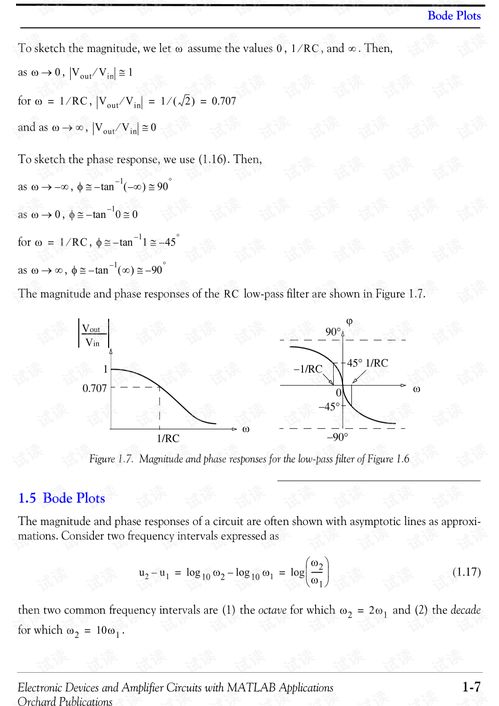
Bode图分析:使用`bode`函数绘制Bode图,例如:`bode(sys)`。
Nyquist图分析:使用`nyquist`函数绘制Nyquist图,例如:`nyquist(sys)`。
李雅普诺夫稳定性分析:使用`lyapunov`函数进行李雅普诺夫稳定性分析,例如:`[V, E] = lyapunov(sys)`,其中`V`为李雅普诺夫函数,`E`为特征值。
能控性和能观性判断
能控性和能观性是线性系统理论中的重要概念。在MATLAB中,可以使用以下方法判断线性系统的能控性和能观性:
能控性判断:使用`controllability`函数判断线性系统的能控性,例如:`[C, E] = controllability(sys)`,其中`C`为能控性矩阵,`E`为特征值。
能观性判断:使用`observability`函数判断线性系统的能观性,例如:`[O, E] = observability(sys)`,其中`O`为能观性矩阵,`E`为特征值。
状态反馈与闭环极点配置

状态反馈与闭环极点配置是线性系统理论中的重要内容。在MATLAB中,可以使用以下方法进行状态反馈与闭环极点配置:
状态反馈:使用`place`函数进行状态反馈,例如:`K = place(sys, [1 2 3])`,其中`K`为状态反馈矩阵,`[1 2 3]`为期望的闭环极点。
闭环极点配置:使用`poles`函数进行闭环极点配置,例如:`poles(sys)`,其中返回系统的闭环极点。
状态观测器

状态观测器是线性系统理论中的重要工具。在MATLAB中,可以使用以下方法设计状态观测器:
李雅普诺夫观测器:使用`lyapunov`函数设计李雅普诺夫观测器,例如:`[V, E] = lyapunov(sys)`。
相关推荐




教程资讯
教程资讯排行