
ins 惯性导航系统,自主导航的未来
时间:2024-10-28 来源:网络 人气:
惯性导航系统(INS):自主导航的未来

一、惯性导航系统的原理

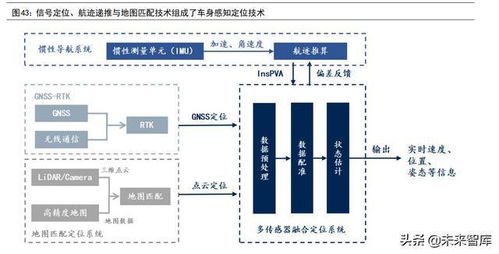
惯性导航系统(INS)是一种基于物体固有惯性原理建立的导航系统。它不依赖于外部信息,也不向外部辐射能量,具有隐蔽性和自主性。惯性导航系统的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,并把它变换到导航坐标系中,从而得到在导航坐标系中的速度、偏航角和位置等信息。
二、惯性导航系统的特点
1. 自主性:惯性导航系统不依赖于外部信息,可以在没有外部信号的情况下独立工作,具有很高的自主性。
2. 隐蔽性:惯性导航系统不向外部辐射能量,不易被敌方发现和干扰,具有很高的隐蔽性。
3. 高精度:惯性导航系统具有较高的测量精度,可以满足各种复杂环境下的导航需求。
4. 抗干扰能力强:惯性导航系统不受电磁干扰、信号遮挡等因素的影响,具有较强的抗干扰能力。
5. 应用范围广:惯性导航系统可应用于航空航天、军事、民用等多个领域。
三、惯性导航系统的应用

1. 航空航天领域:惯性导航系统在航空航天领域具有广泛的应用,如卫星导航、导弹制导、飞行器姿态控制等。
2. 军事领域:惯性导航系统在军事领域具有很高的应用价值,如潜艇导航、无人机导航、导弹制导等。
3. 民用领域:惯性导航系统在民用领域也得到了广泛应用,如汽车导航、船舶导航、精准农业等。
四、惯性导航系统的发展趋势

1. 高精度:通过采用新型传感器和算法,提高惯性导航系统的测量精度。
2. 小型化:减小惯性导航系统的体积和重量,使其更易于携带和应用。
3. 智能化:结合人工智能技术,提高惯性导航系统的自适应能力和抗干扰能力。
4. 网络化:将惯性导航系统与其他导航系统进行融合,实现多源信息融合,提高导航精度和可靠性。
作者 小编
相关推荐



教程资讯
教程资讯排行









