matlab 非线性控制系统,非线性控制系统的建模
时间:2024-12-05 来源:网络 人气:
非线性控制系统在工程领域中扮演着重要角色,尤其是在那些对系统性能要求较高的场合。与线性控制系统相比,非线性系统具有更复杂的动态特性,这使得它们在建模、分析和设计上更具挑战性。本文将介绍MATLAB在非线性控制系统中的应用,包括建模、仿真和设计等方面。
非线性控制系统的建模
传递函数法:通过传递函数描述系统的输入输出关系,适用于具有明确数学模型的非线性系统。
状态空间法:通过状态空间方程描述系统的动态特性,适用于具有复杂动态特性的非线性系统。
数据驱动法:通过实验数据拟合非线性模型,适用于无法建立精确数学模型的非线性系统。
非线性控制系统的仿真
在MATLAB中,非线性控制系统的仿真可以通过以下步骤实现:
建立模型:根据所选的建模方法,在MATLAB中建立非线性控制系统的模型。
设置仿真参数:设置仿真时间、步长等参数。
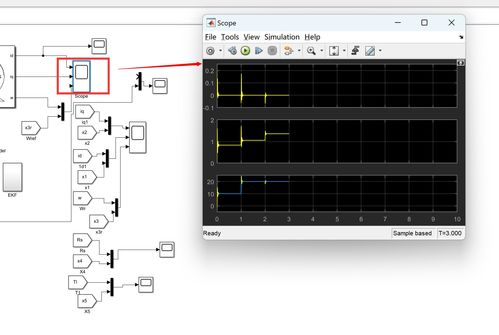
运行仿真:运行仿真,观察系统动态响应。
分析结果:分析仿真结果,评估系统性能。
非线性控制系统的设计
在MATLAB中,非线性控制系统的设计可以通过以下方法实现:
基于李雅普诺夫稳定性理论的设计:通过李雅普诺夫稳定性理论设计控制器,保证系统稳定。
基于鲁棒控制的设计:通过鲁棒控制设计控制器,提高系统对参数不确定性和外部扰动的鲁棒性。
基于自适应控制的设计:通过自适应控制设计控制器,使系统适应参数变化。
实例分析
以下是一个基于MATLAB的实例,说明如何对非线性控制系统进行建模、仿真和设计。
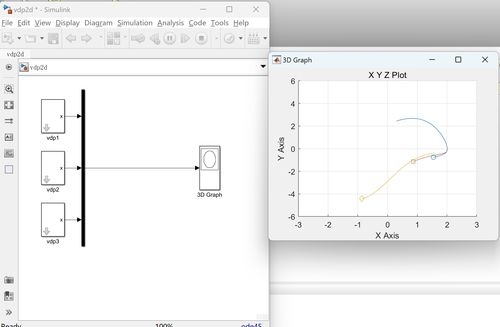
建模:以一个简单的非线性弹簧系统为例,使用状态空间法建立模型。
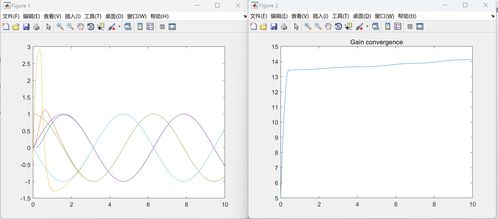
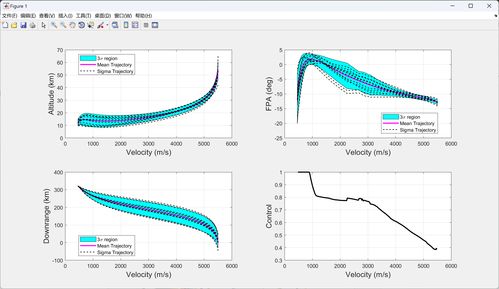
仿真:在MATLAB中运行仿真,观察系统动态响应。
设计:基于李雅普诺夫稳定性理论设计控制器,保证系统稳定。
本文介绍了MATLAB在非线性控制系统中的应用,包括建模、仿真和设计等方面。通过MATLAB,我们可以方便地对非线性控制系统进行分析和设计,提高系统性能。在实际工程应用中,非线性控制系统具有广泛的应用前景,MATLAB将成为我们不可或缺的工具。
相关推荐




教程资讯
教程资讯排行